FrSky Telemetry
PX4 supports D (old) and S (new) FrSky telemetry. FMUv4 based boards (Pixracer) include the required electronics for the interface, older boards (Pixhawk) need a UART to S.PORT adapter board.
Pixracer
FrSky telemetry auto-starts on Pixracer and detects D or S mode, there is no need to configure anything.
For receivers with D-port (D4R-II and similar): Connect the Pixracer FrSky TX line to the D4R-II RX line. Also connect GND.
For receivers with S-port: Connect the Pixracer FrSky TX and RX lines together (solder the wires together) to the X series receiver's S.port pin. Also connect GND.
LuaPilot: Telemetry Screen on the Taranis
If you have a Taranis that can receive the telemetry stream (e.g. a Taranis X9D
Plus), you can install a script that shows you a nice overview of the received
telemetry:
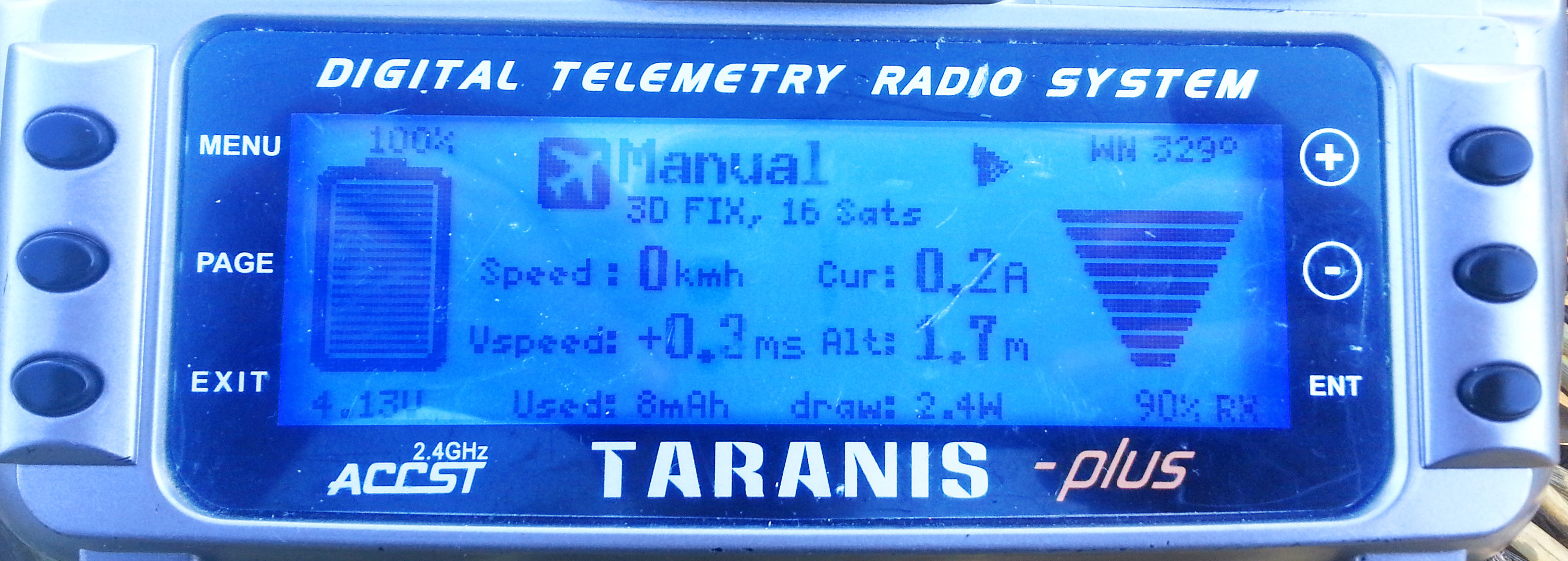
You can see:
- Current flight mode
- GPS fix
- Vehicle heading
- Battery level
- RC signal strength
- Current speed and altitude
- and more
Once you have the hardware connected, follow the instructions on http://ilihack.github.io/LuaPilot_Taranis_Telemetry/, Section Taranis Setup OpenTX.
If you open the LuaPil.lua script with a text editor, you can edit the
configuration. Suggested modifications:
local BattLevelmAh = -1 -- use the battery level calculation from the vehicle
local SayFlightMode = 0 -- there are no WAV files for the PX4 flight modes
Cable/adapter sources
Ready-made cables (which include the required adapters) are available from:
Craft and Theory. Versions are available with DF-13 compatible PicoBlade connectors (for FMUv2/3DR Pixhawk, FMUv2/HKPilot32) and JST-GH connectors (for FMUv3/Pixhawk 2 "The Cube" and FMUv4/PixRacer v1).

UART to S.PORT adapters can be sourced from:
- SPC: getfpv.com, unmannedtechshop.co.uk
- FUL-1: unmannedtech.co.uk