Sensor Selection
PX4 autopilot is capable of flying without any additional external sensors, because Pixhawk (the hardware FC) already has inbuilt sensors. There are 3 Gyros + 3 Accelerometers + 3 Magnetometers + Barometric pressure sensor for proper altitude reading. Despite that, we strongly recommend using GPS in all frames in order to unveil the full potential of the aircraft or vehicle and enable its automatic modes. For most of the fixed wing aircraft, Airspeed sensor is mandatory as well.
GPS
There are many types of GPS you can use with Pixhawk and PX4. We recommend using GPS + Compass solution like the original 3DR GPS or alternative LEA 6H, NEO 7M, NEO 8 GPS+Compass solutions.


Because the internal compass of Pixhawk is close to other electronics it could be susceptible to electromagnetic noise. So when we use the external Compass we can locate it away from electronics on a pedestal or at the wing of the plane.
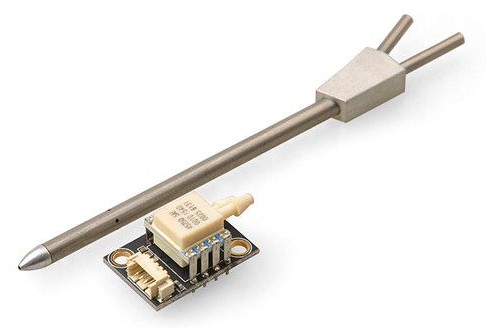
Airspeed
The Airspeed sensor is mandatory for most of the Airplane Frames and for all VTOL Frames. It is very important sensor because the PX4 autopilot does not have other means to detect stall, except with the airspeed sensor. For the airplane it is the airspeed that guarantees lift not ground speed. We recommend using the digital airspeed sensor.
Distance
There are more and more affordable Lidar Rangefinder options. These sensors are used during the final phase of landing for precise altitude measuring. They are also used for avoidance. PulsedLight launched their Lidar-Lite2 Laser Rangefinder. as an economical laser based measurement solution supporting a wide variety of applications like in drones. It measures distance, velocity and signal strength of cooperative and non cooperative targets at distances from zero to more than 40 meters. Offering the highest performance available in a single beam ranging sensor in its class.

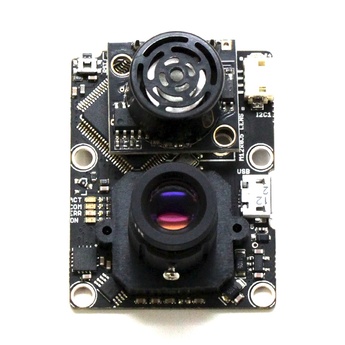
Position
Flow is an optical flow smart camera that can track motion, as well has as integrated sonar sensor. The blended information is fed to the Pixhawk to have one of the most locked in position holds available. It is used as a Positioning sensor when there is no GPS signal like indoors.
For the wiring of all sensors see: Sensors Wiring.